




УСИЛИТЕЛЬ И КОНТРОЛЛЕР XCD2
| XCD2 Drive and Control | |||||
| Технические характеристики: |
|
 |
|||
| Электрические параметры |
|
||||
| Сопутствующие изделия: |
|
||||
ПЛАТА ХОСТ-АДАПТЕРА
Плата хост-адаптера обеспечивает простой способ подключения к материнской плате XCD2. Стандартный соединитель обеспечивает штыревое соединение pin-to-pin с соединителем хост-адаптера. В дополнение плата имеет разъем разъема питания 5В.
Доступны три платы:
A - Интерфейсы связи RS232 и RS485
B - Содержит соединение pin-to-pin между соединителем хост-адаптера и соединителем
С - Интерфейсы связи C - I2C, SPI и UART
ПЛАТА ПИТАНИЯ ДВИГАТЕЛЯ
XCD2 предназначен для работы с моторами Nanomotion EDGE и EDGE-4X. Контроллер может поддерживать двухосевую конфигурацию с количеством двигателей от 1 до 4 EDGE и от 1 до 2 EDGE-4X.
Каждая плата питания двигателей доступна со стандартными плоскими ленточными кабелями и разъемами.
ИНТЕРФЕЙС ДАТЧИКА
XCD2 поддерживает либо инкрементный энкодер, с прямоугольными сигналами A-B, либо абсолютный BiSS-энкодер. Доступны обе платы интерфейса.
ИНТЕРФЕЙС ГИРОСКОПА
Встроенный интерфейс гироскопа использует порт SPI и обеспечивает (8) стабилизированных предустановок для легкого перехода между режимами (энкодер + гироскоп).
Интерфейс гироскопа поддерживает только гироскоп InvenSense MPU-6000.
ОЦЕНОЧНЫЕ НАБОРЫ
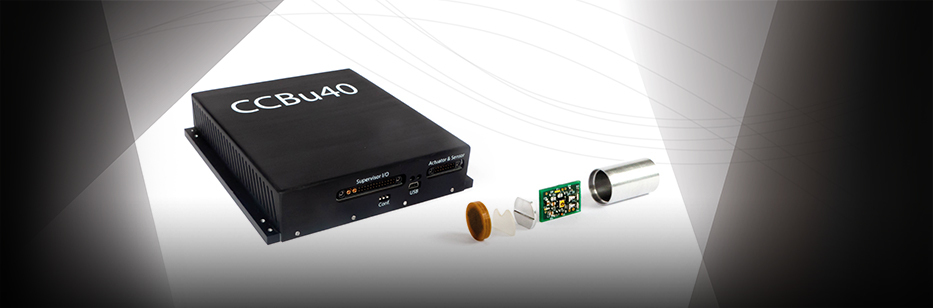
Для разработки приложений Nanomotion предлагает множество комплектов для разработки, которые содержат двигатели/механические оси и различные конфигурации плат управления. Nanomotion также может поставлять отдельно плату XCD2, предоставляя все компонентов в конфигурации «оснастки», обеспечивая гибкость при переключении между платами питания двигателя, выбором энкодера и интерфейсами связи.
Большинство задач в конечном счете ведут к интеграции микросхемы XCD2 или платы питания двигателя в электронную электронику заказчика для экономии места. Однако для всех приложений поддерживается использование различных оценочных плат и даже изготовление платы на заказ под конкретные условия.
Рекомендации по применению:
- Модули автофокусировки / изменения поля обзора
- Поворотно-наклонный подвес с гиростабилизацией
- Управление лучом и стабилизацией
- Устройства сбора информации о цели
Описание изделия:
Многоосевой усилитель и контроллер XCD2 выполнен на плате в OEM исполнении и предназначен для задач с использованием двигателей EDGE и EDGE-4X. На плате XCD2 установлен двухосевой контроллер. XCD2 может работать с несколькими двигателями EDGE или EDGE-4X, установленными на каждой оси.
Плата XCD2 также поддерживает вход гироскопа Nanomotion для стабилизации по двум осям. XCD2 запрограммирован через IIC и может поддерживать входной прямоугольный сигнал (инкрементный) энкодера, а также входной сигнал энкодера BiSS (абсолютный).
XCD2 поддерживает 2 оси движения в режиме работы AB1 или AB5. Применяется усовершенствованный 32-разрядный процессор с плавающей запятой, архитектура ARM, 168 МГц, с настраиваемой серво частотой до 20 кГц.
Связь поддерживаются через UART, I2C, SPI и USB, а также имеется встроенный интерфейс гироскопа с использованием SPI-порта.
Расширенные операции ввода-вывода с (8) GPIO, (16) АЦП и (2) ЦАП с настраиваемыми параметрами.